
PuzzleFlex: Kinematic Motion of Chains with Loose Joints
ICRA 2020
Samuel Lensgraf, Karim Itani, Yinan Zhang, Zezhou Sun, Yijia Wu, Alberto Quattrini Li, Bo Zhu, Emily Whiting, Weifu Wang, Devin Balkcom
Abstract
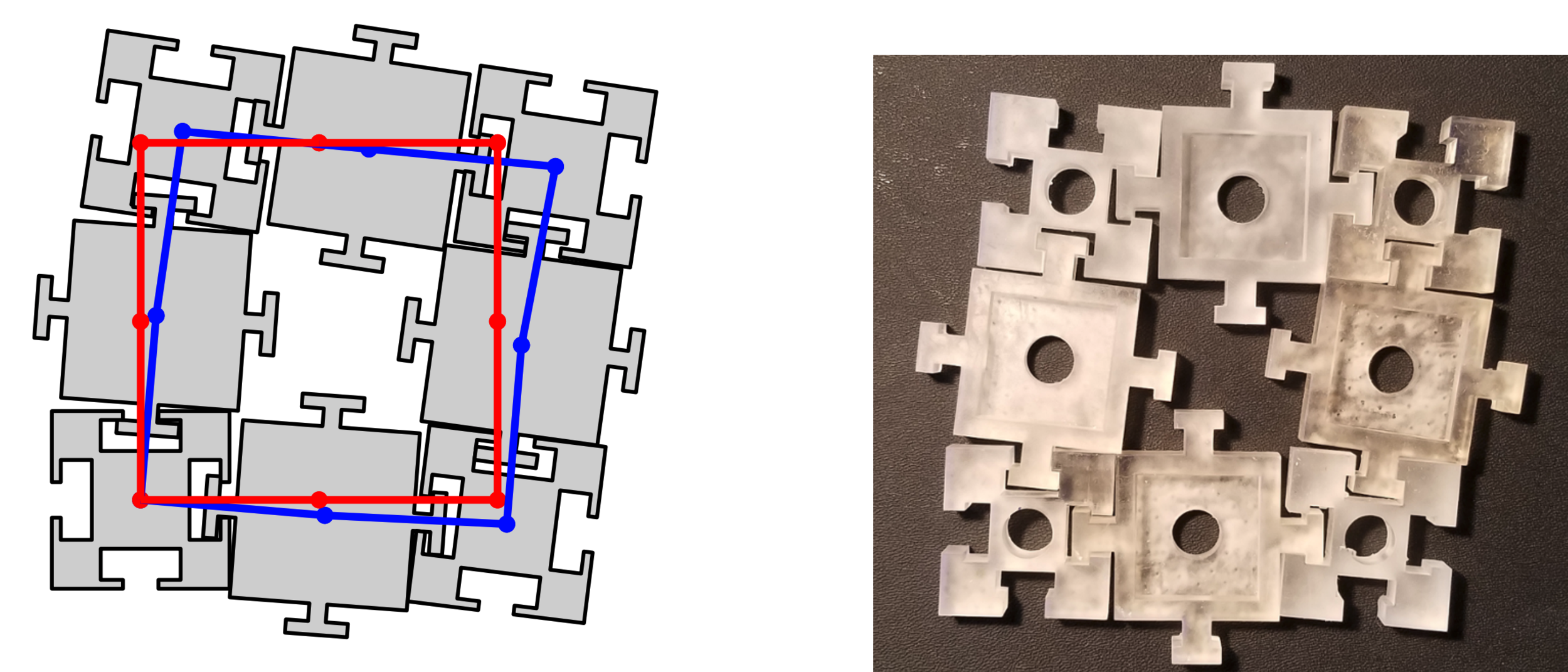
This paper presents a method of computing free motions of a planar assembly of rigid bodies connected by loose joints. Joints are modeled using local distance constraints, which are then linearized with respect to configuration space velocities, yielding a linear programming formulation that allows analysis of systems with thousands of rigid bodies. Potential applications include analysis of collections of modular robots, structural stability perturbation analysis, tolerance analysis for mechanical systems, and formation control of mobile robots.
News
July 11, 2019: Tech Xplore - Robotics, Engineering: “PuzzleFlex: Computing the kinematic motion of systems with loose joints”